在 4 中成功绘制了三角形以后,下面我们来加载一个 fbx 文件,然后构建 MVP 变换(model-view-projection)。简单介绍一下:
- 从我们拿到模型(主要是网格信息)文件开始,模型网格(Mesh)里记录模型的顶点位置信息,比方说 (-1,1,1) 点,那么这个点是相对于这个模型的(0,0,0)点来说的,这和我们在制作模型的时候有关,例如我可以让这个(0,0,0)点位于模型的中心也可以是底部。
- 接着我们需要通过放置许多的模型来构建整个场景,为了描述每个物体的位姿(位置和姿态),我们需要一个世界原点,然后所有物体的位姿信息都是相对于这个世界原点的。如果用过游戏引擎或者 DCC 软件的话,一般每个物体都会有一个 transform 来描述这件事情。因此第一步我们需要将物体的顶点从建模时候的坐标系,变换到世界坐标系下,这个变换矩阵就是我们说的 model 矩阵,也就是引擎中 transform 组件描述的变换。
- 将模型的顶点位置变换到世界坐标系下以后,我们还需要进行 view 矩阵的变换,view 变换的过程模拟眼睛看东西的过程,一般用一个相机来描述,这个相机是一般是看向 -z 方向的。我们需要将模型变换到相机的坐标系下,方便的后面的投影操作。这个 view 变换,其实不是相机特有的,因为我们可以将物体变换到任意一下坐标系下。
- 将物体变换到相机坐标系下后,最后要做一个投影的操作,一般来说三维场景做的都是透视变换,符合我看到的近大远小的规律。
上面用大白话简单描述了一下这几个矩阵,相关资料有很多,本系列重在实践,因为看再多的理论,不如自己亲手实践一下印象深刻,有时候不明白的原理,动手做一下就明白了。如果希望看相关的数学推导理论,证明之类的可以搜一搜有很多。我这里提供一下我之前写的关于变换的两个文章:
下面来实践一下,代码基于第 4 篇文章继续完善。 完整的代码:https://github.com/MangoWAY/CGLearner/tree/v0.2,tag v0.2
1. 加载 fbx 模型
在第 3 篇中介绍了如何安装 pyassimp,这回我们来用一下,我们先定义一个简单的 Mesh 和 SubMesh 类保存加载的模型的数据,然后再定义一个模型加载类,用来加载数据,代码如下所示,比较简单。
# mesh.py
class SubMesh:
def __init__(self, indices) -> None:
self.indices = indices
class Mesh:
def __init__(self) -> None:
self.vertices = []
self.normals = []
self.subMeshes = []
# model_importer.py
# pyassimp 4.1.4 has some problem will lead to randomly crash, use 4.1.3 to fix
# should set link path to find the dylib
import pyassimp
import numpy as np
from .mesh import Mesh, SubMesh
class ModelImporter:
def __init__(self) -> None:
pass
def load_mesh(self, path: str):
scene = pyassimp.load(path)
mmeshes = []
for mesh in scene.meshes:
mmesh = Mesh()
mmesh.vertices = np.reshape(np.copy(mesh.vertices), (1,-1)).squeeze(0)
print(mmesh.vertices)
mmesh.normals = np.reshape(np.copy(mesh.normals),(1,-1)).squeeze(0)
mmesh.subMeshes = []
mmesh.subMeshes.append(SubMesh(np.reshape(np.copy(mesh.faces), (1,-1)).squeeze(0)))
mmeshes.append(mmesh)
return mmeshes
2. 定义 Transform
Transform 用来描述物体的位置、旋转、缩放信息,可以说是比较基础的,所以必不可少,详细的解释在代码的注释里。
import numpy as np
from scipy.spatial.transform import Rotation as R
class Transform:
def __init__(self) -> None:
# 为了简单,目前我用欧拉角来存储旋转信息
self._eulerAngle = [0,0,0]
self._pos = [0,0,0]
self._scale = [1,1,1]
# -- 都是常规的 get set,这里略去
# ......
# 这就是我们所需要的 model 矩阵,注意这里没有考虑的物体的层级
# 关系,默认物体都是在最顶层,所以 local 和 world 坐标是一样
# 后续的文章会把层级关系考虑进来
def localMatrix(self):
# 按照 TRS 的构建方式
# 位移矩阵 * 旋转矩阵 * 缩放矩阵
mat = np.identity(4)
# 对角线是缩放
for i in range(3):
mat[i,i] = self._scale[i]
rot = np.identity(4)
rot[:3,:3] = R.from_euler("xyz", self._eulerAngle, degrees = True).as_matrix()
mat = rot @ mat
for i in range(3):
mat[i,3] = self._pos[i]
return mat
# 将世界坐标变换到当前物体的坐标系下,注意这里也是没有考虑层级关系的
# 这个可以用来获得从世界坐标系到相机坐标系的转换。
def get_to_Local(self):
mat = self.localMatrix()
ori = np.identity(4)
ori[:3,:3] = mat[:3,:3]
ori = np.transpose(ori)
pos = np.identity(4)
pos[0:3,3] = -mat[0:3,3]
return ori @ pos
3.定义相机
最后我们定义相机,目前相机的 Transform 信息可以用来定义 View 矩阵,其他例如 fov 等主要用来定义投影矩阵。
from math import cos, sin
import math
import numpy as np
class Camera:
def __init__(self) -> None:
self._fov = 60
self._near = 0.3
self._far = 1000
self._aspect = 5 / 4
# -- 都是常规的 get set,这里略去
# ......
# 完全参照投影矩阵的公式定义
def getProjectionMatrix(self):
r = math.radians(self._fov / 2)
cotangent = cos(r) / sin(r)
deltaZ = self._near - self._far
projection = np.zeros((4,4))
projection[0,0] = cotangent / self._aspect
projection[1,1] = cotangent
projection[2,2] = (self._near + self._far) / deltaZ
projection[2,3] = 2 * self._near * self._far / deltaZ
projection[3,2] = -1
return projection
4. 构建 MVP 矩阵
完成了上述的步骤后,我们就可以构建 MVP 矩阵了。
...
# 定义物体的 transform
trans = transform.Transform()
trans.localPosition = [0,0,0]
trans.localScale = [0.005,0.005,0.005]
trans.localEulerAngle = [0,10,0]
# 获取 model 矩阵
model = trans.localMatrix()
# 定义相机的 transform
viewTrans = transform.Transform()
viewTrans.localPosition = [0,2,2]
viewTrans.localEulerAngle = [-40,0,0]
# 获取 view 矩阵
view = viewTrans.get_to_Local()
# 定义相机并获得 projection 矩阵
cam = Camera()
proj = cam.getProjectionMatrix()
# 构建 MVP 矩阵
mvp = np.transpose(proj @ view @ model)
# 作为 uniform 传入 shader 中,然后 shader 中将顶点位置乘上mvp矩阵。
mshader.set_mat4("u_mvp", mvp)
...
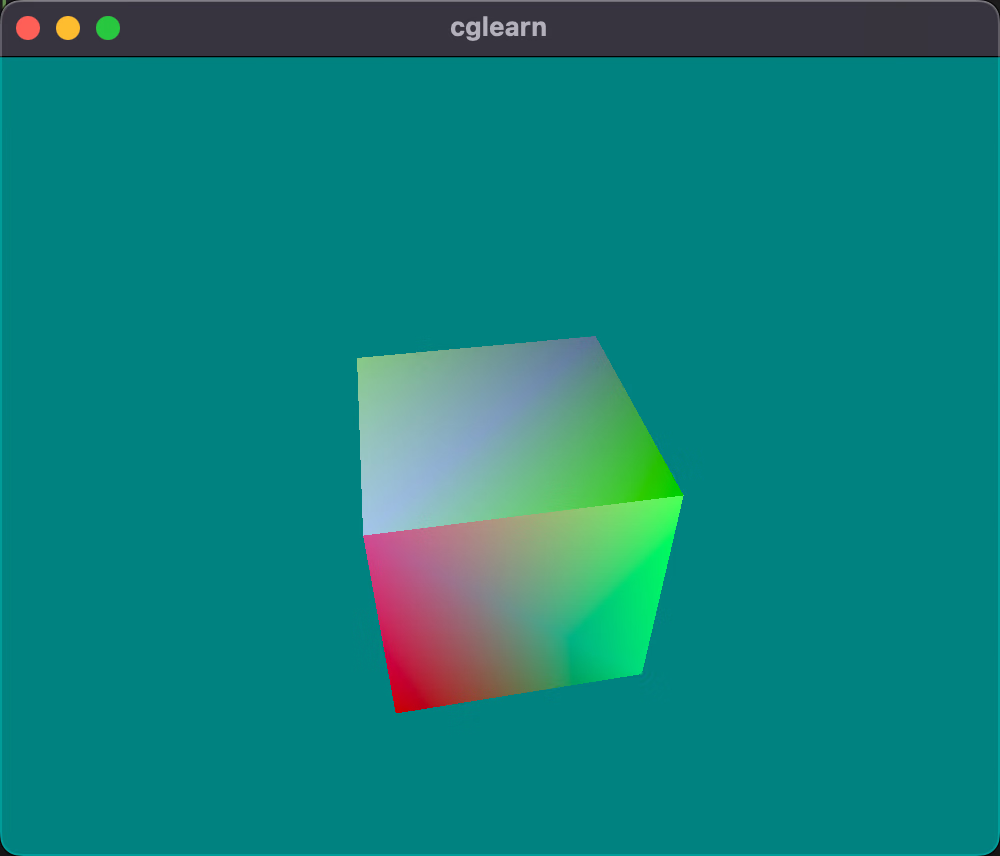
然后加载模型,构建一下顶点数组和索引数组,我给每个顶点额外添加了随机的颜色
importer = ModelImporter()
meshes = importer.load_mesh("box.fbx")
vert = []
for i in range(len(meshes[0].vertices)):
if i % 3 == 0:
vert.extend([meshes[0].vertices[i],meshes[0].vertices[i + 1],meshes[0].vertices[i + 2]])
vert.extend([meshes[0].normals[i],meshes[0].normals[i + 1],meshes[0].normals[i + 2]])
vert.extend([random.random(),random.random(),random.random()])
inde = meshes[0].subMeshes[0].indices
# 开一下深度测试
gl.glEnable(gl.GL_DEPTH_TEST)
我们可以看一下最终效果。
总结:
- 通过 Transform 我们可以获得 model 矩阵和 view 矩阵;
- 通过相机的参数,我们可以获得 projection 矩阵;
- 按照 p * v * m * pos 的顺序,即可将顶点位置进行投影;
- 本文代码没有考虑层级关系,为了简洁,原理都是一样的;
- 为了简洁旋转采用的欧拉角进行存储,没有用四元数。 希望本文的例子,可以帮助理解 MVP 矩阵,以及学习一下如何加载、渲染模型的 API 等。
标签:
留言评论