有这个想法的初衷
喜欢电子和DIY硬件的朋友对稚晖君应该都不陌生,他定期都会分享一些自己做的好玩的硬件,他之前做了一个ElectronBot桌面机器人我就很感兴趣,所以就自己也做了一个。
 起初我只是自己开发了一个叫电子脑壳的上位机软件,大家在之前的博客里应该也有见到,是个用WinUI(WASDK)开发的Windows应用软件。
起初我只是自己开发了一个叫电子脑壳的上位机软件,大家在之前的博客里应该也有见到,是个用WinUI(WASDK)开发的Windows应用软件。
ElectronBot机器人要一直和电脑连接通过应用进行控制,很多的网友都想ElectronBot脱离电脑使用,于是我也想着能有什么好办法,所以也就有了这个标题的想法。
技术选型
大家想到树莓派肯定就会想起python,大学的时候玩树莓派确实用python比较多,但是作为一个.NET开发人员当然要尝试下.NET的跨平台能力到底如何了。
由于先有了之前写的上位机软件电子脑壳,也想着让之前封装的SDK能够直接用在树莓派上,所以选择.NET是顺理成章的事情了。
- 应用开发选择.NET框架
- 通讯方式选择GRPC
- USB操作选择LibUsbDotNet调用libusb
整体方案如下图:

环境配置
1. 树莓派系统安装及网络配置
树莓派支持的系统有很多种,像官方的Debian,Ubuntu等等。 我平时使用Debian比较多,但是测试的时候好像usb操作有些问题,应该是我用的.net互操作库对Debian支持的不太好,所以我选择了ubuntu的系统。
安装烧录工具,下载系统,然后烧录系统。如下图所示:

目前树莓派Zero 2 W的Ubuntu只有Server版本和Core版本,需要使用命令行做操作。
网络配置可以参考下面的文章进行配置。
树莓派4B ubuntu server ssh服务器部署全过程详解(内网穿透)
能正常联网安装软件就可以了。
2. .NET6的运行环境
由于.NET6 Arm64官方没提供包管理安装,所以需要大家通过脚本,或者下载文件安装。 网络好的可以通过脚本安装,简单,本文以脚本安装示例。
参考文档如下:
使用安装脚本或通过提取二进制文件在 Linux 上安装 .NET
下载安装脚本dotnet-install.sh放到用户家目录
执行以下指令添加执行权限
sudo chmod +x ./dotnet-install.sh
执行指令安装
./dotnet-install.sh -c Current
下载解压结束需要我们配置环境变量,就像windows安装软件一样,配置完环境变量,才可以直接通过dotnet直接使用了,不然是提示找不到指令的。
以下指令是编辑环境变量的,我选择了~/.bashrc,在文档最底部添加环境变量内容。
sudo vim ~/.bashrc
内容
export DOTNET_ROOT=$HOME/.dotnet
export PATH=$PATH:$HOME/.dotnet:$HOME/.dotnet/tools
保存并退出,然后执行dotnet如果正常就可以进行下面的操作了。
实践过程记录
1. GRPC服务的开发与调试
首先用创建一个grpc服务

协议文件编写和服务编写
以我的协议内容为例包含了float,bool,bytes类型
float 对应 c# float
bool 对应 c# bool
bytes 对应 c# byte[]
syntax = "proto3";
option csharp_namespace = "Verdure.ElectronBot.GrpcService";
package electronbotactiongrpc;
// The electronbotaction service definition.
service ElectronBotActionGrpc {
// Sends a greeting
rpc PlayEmoticonAction (EmoticonActionFrameRequest) returns (EbHelloReply);
}
// The request message containing the user's name.
message EmoticonActionFrameRequest {
float J1 = 1;
float J2 = 2;
float J3 = 3;
float J4 = 4;
float J5 = 5;
float J6 = 6;
bool Enable = 7;
bytes FrameBuffer = 8;
}
// The response message containing the greetings.
message EbHelloReply {
string message = 9;
}
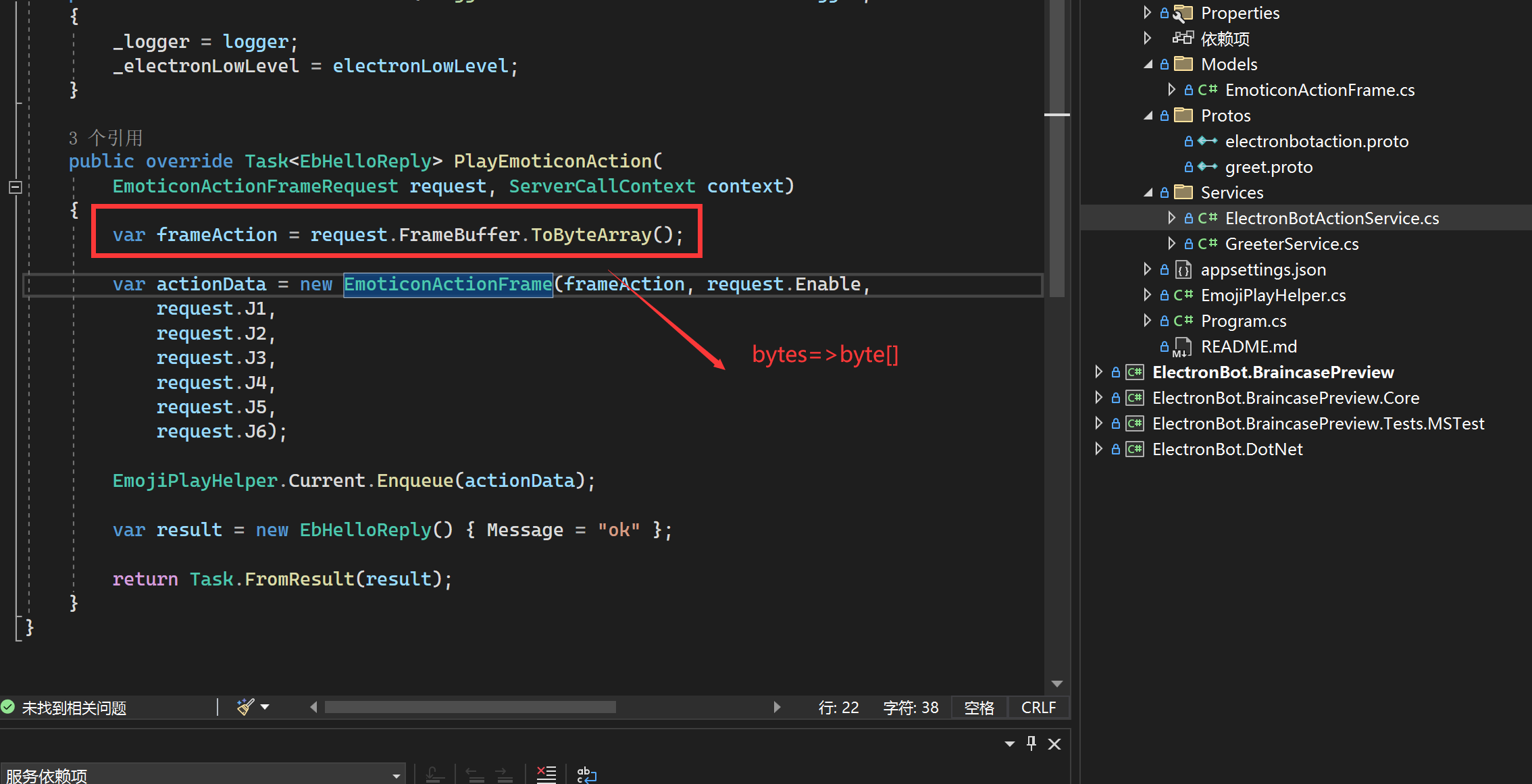
然后生成对应的服务代码
主要注意点是bytes类型的转换
服务端写好了以后,就可以写调用端代码了,为了图方便我就在电子脑壳代码里加了调用代码。
WinUI调用GRPC注意事项
直接将gprc相关的东西放到winui项目里好像有一些问题,所以我把它放到了一个库项目里进行操作了。
配置协议文件生成client代码

电子脑壳注入grpc-client
services.AddGrpcClient<ElectronBotActionGrpc.ElectronBotActionGrpcClient>(o =>
{
o.Address = new Uri("http://192.168.3.236:5241");
});
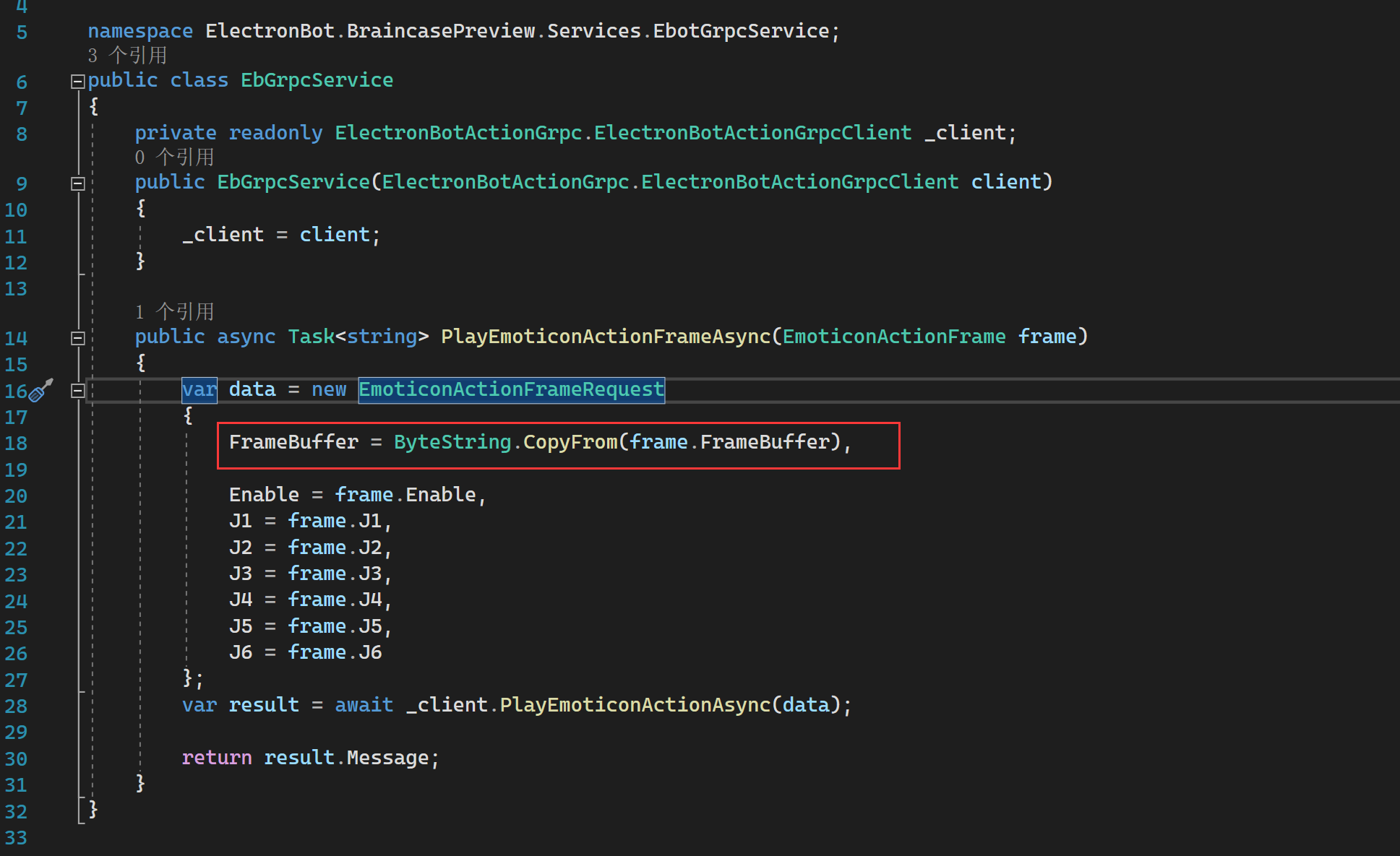
数据发送端也要注意bytes类型的转换
grpc服务的打包发布
打包的时候选择目标运行时为可移植(windows和linux都可以运行)

2. 服务的部署与效果验证
通过ftp工具将grpc服务放到树莓派上,首先需要连接ElectronBot之后再运行服务
进入项目所在目录执行指令如下:
dotnet Verdure.ElectronBot.GrpcService.dll --urls="http://*:5241"
如果通讯正常,那么应该会报错,提示libusb找不到,系统已经安装了libusb,只是.net调用的时候目录没有找到,需要我们创建软连接。
树莓派实际操作如下:
sudo find / -name "libusb-1.0*.so*" //列出库的目录位置
cd /usr/lib/aarch64-linux-gnu/ //进入库所在目录
sudo ln -s libusb-1.0.so.0 libusb-1.0.so //创建链接
通过上面的操作 libusb的操作应该就没有问题了。
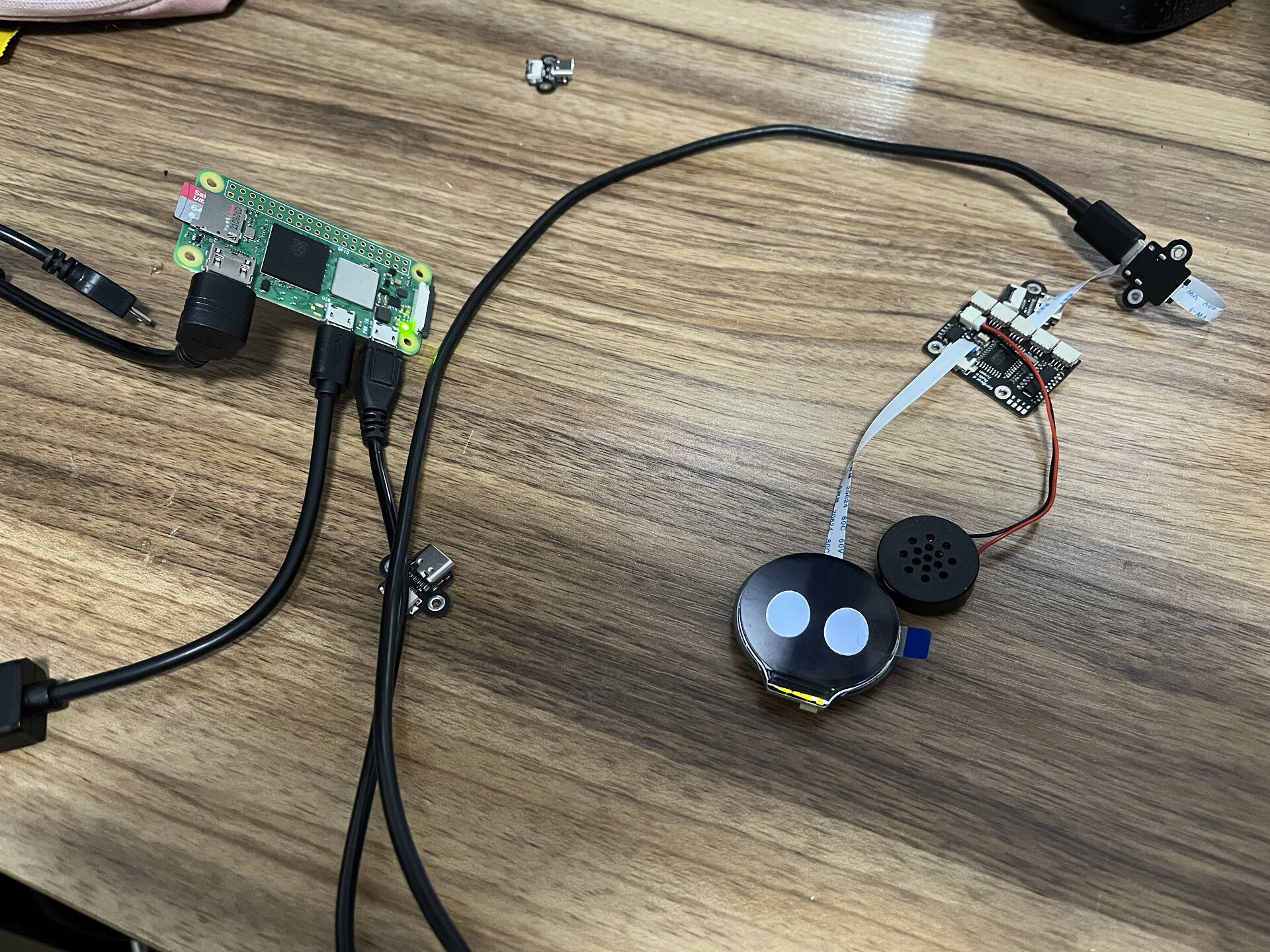
运行的效果如下图:
特殊问题与心得体会
最大的一个问题就是在sdk放到linux系统上测试写入数据异常。
- 需要sdk单独处理linux环境
- 需要sdk补一些内核驱动卸载逻辑
- 特别注意otg数据线不要使用那种一拖几的,用一个口的就行不然数据发送不过去
由于使用的LibUsbDotNet上述逻辑没暴露到上层,我只好拉了一个分支改了发了一个包,问pr也没人理我。
sdk内部特别处理的代码如下:
执行了一个设备的SetAutoDetachKernelDriver
if (wholeUsbDevice.DriverMode == UsbDevice.DriverModeType.MonoLibUsb)
{
_logger.LogInformation("MonoLibUsb DetachKernelDriver");
var retDetach = wholeUsbDevice.SetAutoDetachKernelDriver(true);
_logger.LogInformation(retDetach.ToString());
}
通过这次的尝试,我算是明白了理想很丰满,现实很骨感的意思,本来觉得树莓派Zero 2 W小巧便携,而且我只是用它接收数据发送数据,结果数据发送的时候屏幕的刷新很慢,不知道是性能差劲,还是usb传输是瓶颈。下次换个4b进行测试一下。
至此整个过程就分享完了,这个项目基本上涵盖了.net技术内的很多东西,如果ElectronBot和树莓派结合独立以后能够很好的使用,我觉得用MAUI开发一个手机端的管理工具也是顺理成章了,可以期待一下,能看到这里的可以在评论区给点意见了。
标签:
留言评论